发布时间:2023-08-18 浏览量:2451

前 言
在Airex®平衡软踏与其他平面上的体位稳定性重测信度研究。

小
年
摘要
⚫ 目的:泡沫垫是医疗机构和实验室常用的评估姿势控制工具,但尚缺乏数据来说明哪种泡沫垫的平衡干扰效果更好。本研究的目的是通过使用两种常用的不同类型的泡沫垫,评估姿势摆动参数的重测信度,确定哪种类型的泡沫更能提供可靠的姿势干扰。
⚫ 过程:使用平衡加速测量设备,在三种不同的表面条件(硬地面、瑞士Airex®平衡软踏和美国某知名品牌泡沫垫(代称B软垫)),睁眼和闭眼的情况下记录90秒的姿势摇摆。组内相关系数用于确定重测信度。
⚫ 结果:在硬地面上睁眼和闭眼的测得路径长度值(ICC(3,1)= 0.61-0.64,p<0.05)、Airex®软踏上睁眼和闭眼对路径长度值(ICC(3,1)= 0.41-0.81,p>0.05)以及B软垫上睁眼和闭眼的路径长度值(ICC(3,1)= 0.29-0.45,p >0.05)都具有良好的可靠性。
⚫ 结论:Airex®和B泡沫垫均具有良好的可靠性。与B软垫相比,Airex®平衡软踏在闭眼时具有更高的信度得分,且Airex®软踏的NPL比B软垫的信度更高
小
年
平衡策略与泡沫垫
人体姿势控制被认为是基于不同感觉输入的整合,包括视觉、本体感觉和前庭反馈。目前的理论假设有两种不同的控制策略用于维持平衡,被描述为踝关节和髋关节策略。平衡系统通过结合不同幅度和时间关系的踝关节和髋关节策略来迅速适应姿势干扰,这两种不同的平衡策略还存在于安静姿势,以帮助人类维持静态平衡。

为了量化平衡性能的差异,研究人员对不同脚位下的安静姿态进行了研究,以识别平衡性能。然而,仅以不同的脚位站立不足以区分健康受试者和平衡缺陷受试者。需要更有挑战性的环境来区分健康人和有平衡障碍的人。

站在泡沫制成的软垫上是一种便捷的实现方式,它可以增加平衡任务的难度,并且可以区分健康人和有平衡障碍的人站在上改变体位的方向感、足部压力分布,并影响足部的关节感受器和皮肤机械感受器。因此使用不同类型的泡沫垫可以有效提高维持平衡的挑战性,从而实现平衡训练的目的,也可用于评估区分健康人和平衡障碍的人。
小
年
材料和方法
研究对象
10名健康青年志愿者:3男7女;平均年龄(26.9±5.51)岁;身高(167±8.1)cm。
研究设备
本研究使用定制设计和制造的加速度计系统,其中包含了一款双轴加速度计。加速度数据以100 Hz的频率通过蓝牙进行无线传输。数据经过4阶1.25 Hz低通滤波器进行滤波,使用加速度数据的峰间值(PtP)、均方根(RMS)和归一化路径长度(NPL)来量化摇摆姿势。加速度计通过魔术贴固定在步态带上。步态带固定在被试的骨盆周围,传感器连接在带子上,使加速度计的轴与每个被试的前后和左右轴对齐。之前的研究已经验证了加速度计和总结指标的有效性和可靠性。
研究过程
所有受试者均接受两次测试,每次测试间隔24-36小时。每次试验包括6个站立试验:
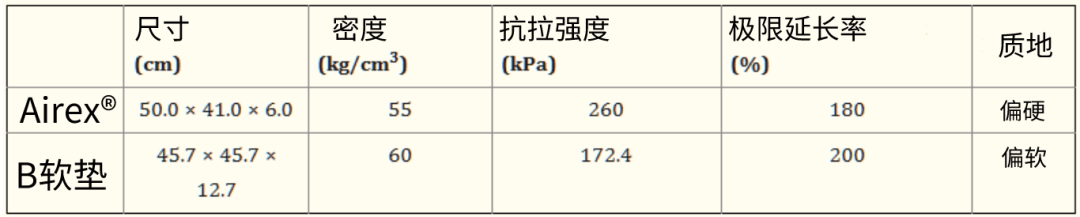
(表1 工具参数)
站在硬地面和两种不同类型的泡沫垫(Airex®蓝色平衡软踏和B灰色软垫,表1)上时睁开眼睛(EO)和闭上眼睛(EC)。根据标准化程序,受试者赤脚站立,双脚并拢,双臂交叉在胸前,在90秒内尽可能维持体位稳定。每个被试的测试顺序如下:
1. 硬地面的EO、硬地面的EC
2. Airex®软踏EO、Airex®软踏的EC
3. B软垫EO、B软垫的EC。
不同平面之间切换需要休息1分钟,以避免疲劳效应。受试者保持体位稳定姿势90秒则为成功。然后进行下一种站立状态测试。如果受试者不能保持稳定站立姿势90秒(迈步、移动手臂或睁开眼睛),则重复试验,允许3次尝试机会。3次尝试后仍不能保持稳定则为失败。
小
年
统计分析
为评估量表的重测信度,采用双向固定一致性模型进行等价性检验组内相关系数(ICC(3,1))。优秀信度为1-0.75,一般-良好信度为0.4-0.74,低信度为0.4-0。
在每个测试条件下,对每个摇摆参数在两个测试期间的表现进行描述性统计(均值±SD)。采用Friedman检验比较EC和EO条件下姿势摇摆参数的均值差异。使用Bonferroni校正(ρ= 0.05/3=0.017)进行Wilcoxon符号秩检验的事后分析。
小
年
数据结果
⚫ 睁眼和闭眼在硬地面上显示为一般-良好信度(ICC(3,1) = 0.57-0.64,p<0.05);
⚫ Airex®软踏上睁眼和闭眼的峰间值和RMS值的信度较低(ICC(3,1) = 0-0.34,均p>0.05),而路径长度值的信度从一般-良好到优秀(ICC(3,1) = 0.41-0.81,睁眼时p>0.05,闭眼时p<0.05);
⚫ 睁眼和闭眼时B软垫信度从低至一般-良好(ICC(3,1)= 0.02-0.45,p>0.05);站立在B软垫上的等效性在假设检验中均无统计学意义(ICC= 0.2-0.45,均p>0.05)。
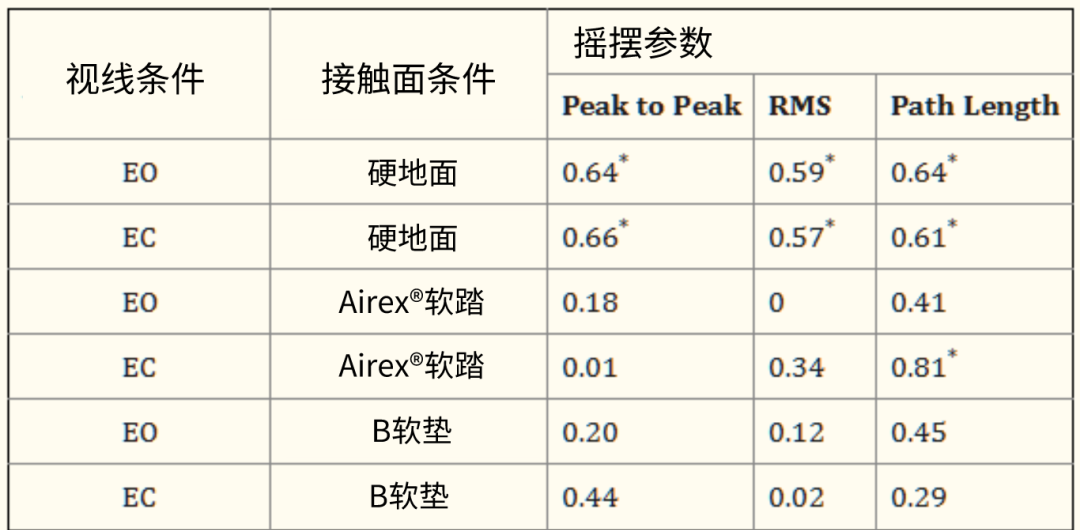
(表2 双向混合一致性模型的ICC)
所有受试者均顺利完成6项测试,未发生跌倒。
Friedman检验表明睁眼和闭眼条件下,三种表面在三个参数上存在显著差异。在睁眼和闭眼条件下,站立在Airex®软踏上的三个参数值均显著高于硬地面。站在B软垫上的数值仅在RMS的EC条件和NPL的睁眼和闭眼条件下显著高于硬地面。Airex®软踏与B软垫在任何条件和任何参数下的差异均无统计学意义。
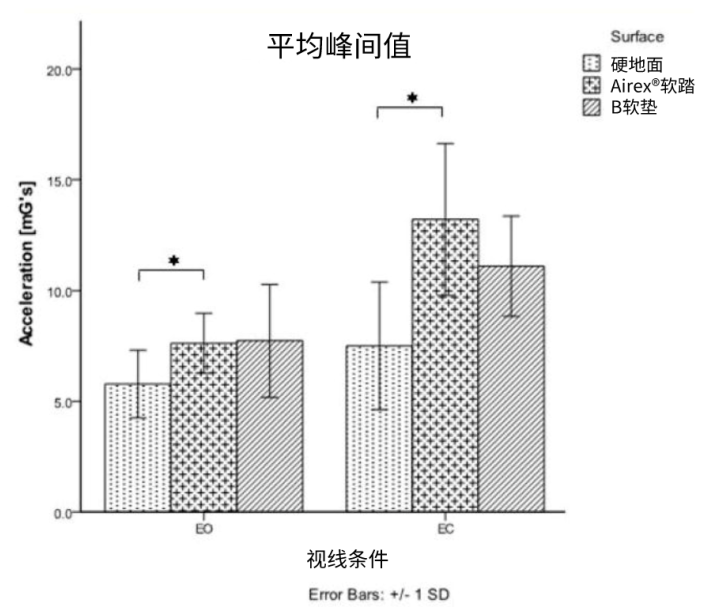
(图1 6种情况下受试者的平均峰间(PtP)摇摆测量(误差条表示±1标准偏差)。在睁眼和闭眼条件下,Airex®软踏的PtP均值均显著高于硬地面上的PtP(p<0.017))
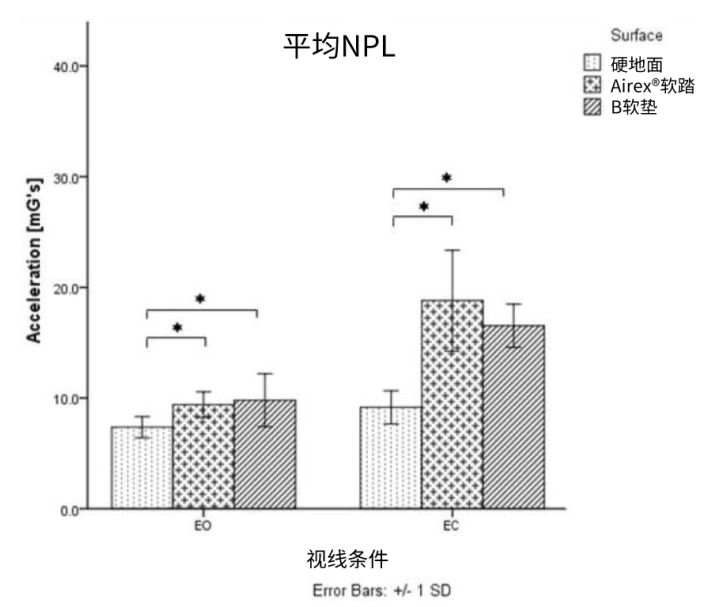
(图2 6种情况下的受试者平均归一化路径长度(NPL)摇摆测量(误差条表示±1标准偏差)。在睁眼和闭眼条件下,硬地面和Airex®软踏以及硬地面和B软垫之间存在显著差异(p<0.01))
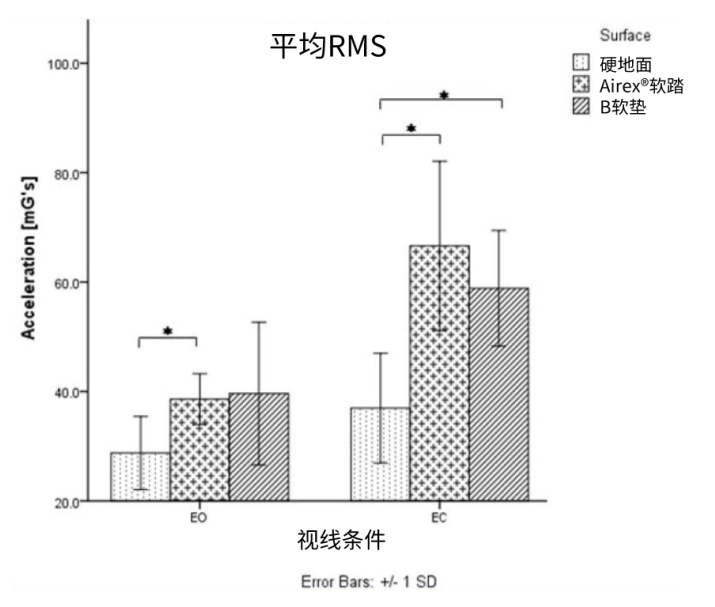
(图3 6种情况下受试者的均方根(RMS)摇摆测量(误差条表示±1标准偏差)。在睁眼条件下,硬质泡沫和蓝色泡沫之间以及在EC条件下硬质泡沫和灰色泡沫之间存在事后显著差异(p<0.017))
小
年
讨论及结论
数据证明,受试者站立在泡沫软垫上的姿势摇摆会增加。两种不同类型的泡沫垫之间没有显著差异,但Airex®软踏的NPL比B软垫的信度更高,可能说明Airex®软踏具有更好的平衡训练能力。
【归一化路径长度(Normalized Path Length,NPL)是评估姿势控制的参数。它是指在站立试验中,身体在空间中摆动的路径长度与身高的比值。NPL可以帮助我们了解受试者站立姿势的稳定性和控制能力。NPL数值越高-站立摆动的路径越长-姿势控制越差;数值越低-站立摆动路径较短-姿势控制较好】
使用加速度测量姿势摇摆已显示出良好的信度和效度。在这些姿势摇摆的参数中,NPL在加速度测量过程中显示出良好的重测信度,以及检测姿势摆动变化的灵敏度。NPL测量的信度在Airex®软踏上表现为一般-良好到优秀,在B软垫上仅表现出低至一般-良好。在闭眼条件下,等价假设检验的信度和显着性增强,说明在相同条件下,NPL参数比PtP和RMS更为敏感。

和Airex®软踏相比,站在B软垫上的统计差异不显著,可能是由于受试者站在B软垫上时,B软垫承受压力较大,回弹和支撑不足,可能导致受试者能够部分感知软垫下方的硬地面,从而增强了平面的稳定性。
Patel相关研究提出泡沫密度和弹性模量与姿势不稳定性相关。泡沫密度和弹性模量越高,姿势不稳定性越高,虽然这两种泡沫垫的弹性模量无法获得,但测试结果表明,Airex®软踏的材料比B软垫的弹性模量更高。

测试的两种类型的泡沫垫均是临床常用的。Carbin等人曾提出泡沫的质地可能会影响姿势摇摆。我们的研究结果显示,不同质地的泡沫垫提供了不同的感觉输入。虽然不同质地的泡沫垫如何影响姿势摇摆尚不清楚,但平衡训练的目标是提高一个人在不同条件下的平衡能力,不同质地的泡沫垫可以增加平衡训练条件的变异性。而Airex®软踏能提供更多、更高的平衡难度,为增强或恢复平衡能力塑造了一个强有力的平台。
文献来源:
Lin CC, Roche JL, Steed DP, Musolino MC, Marchetti GF, Furman GR, Redfern MS, Whitney SL. Test-retest reliability of postural stability on two different foam pads. J Nat Sci. 2015 Feb 1;1(2):e43. PMID: 25834842; PMCID: PMC4378587.
对原文有所删改。
news room
06.27
06.27
05.30
06.27
04.25
02.28
03.14
05.09
03.07
03.07
03.07
03.07
02.21
01.16
02.14
01.22
01.22
01.22
01.10
08.26
07.07
08.26
08.26
07.16
02.21
07.26
08.08
08.08
08.23
07.02
08.02
07.12
07.12
07.12
07.05
05.10
04.19
04.19
04.12
04.08
04.02
03.22
03.22
02.22
03.15
02.23
03.22
03.08
02.22
02.04
02.01
01.05
01.12
01.05
01.05
12.29
12.08
12.08
12.08
11.30
11.30
11.17
10.31
10.31
10.19
10.17
10.12
10.08
09.27
09.01
09.01
09.01
08.18
08.18
08.18
08.11
07.21
07.21
07.21
07.13
07.07
06.30
06.20
06.16
06.09
06.09
05.25
05.19
05.26
05.19
05.12
04.26
04.28
04.26
04.14
04.06
03.31
03.31
03.24